
Appendix C Mapping Tools

Several types of seafloor mapping tools are available, and choosing the right one can be confusing to the nonspecialist. The three types of mapping systems most often applied to seafloor habitats are sidescan-sonar, multibeam, and automatic bottom classification systems. Although a complete discussion of the characteristics, strengths, and weaknesses of each is beyond the scope of this report, a brief discussion is included because it is important to explain that no tool by itself can answer all scientific or management questions. Appropriate mapping tools must be chosen based on the specifics of each case.
Sidescan-sonar systems project a lobe of acoustic energy into the water column that insonifies a wide swath of seafloor on either side of the tow vehicle (or towfish), but a narrow area fore and aft (Figure C.1). Individual scans are accumulated along a trackline to produce a strip of imagery, which resembles a photograph of the seafloor. Adjacent strips often can be assembled into a mosaic to provide a continuouscoverage image of an area. The resolution of the system depends on several factors: the frequency of the signal, the altitude above the seafloor, and the speed and stability of the tow vehicle. A typical system appropriate for shelf mapping might be able to discern objects with dimensions of a few tenths of a centimeter over a range of 100 m (total swath = 200 m). Because of the low incidence angle of the sonar signal, sidescan-sonar systems are particularly good at detecting objects on the seafloor and at showing changes in substrate texture. However, they cannot be used to make bathymetric maps, and because the incidence angle changes across the swath, the interpretation of the data is somewhat qualitative, making automatic classification of bottom types difficult.
Multibeam echosounders use numerous sonar beams at a high angle of incidence with the seafloor and produce narrow swaths of bathymetric data, which can be accumulated into complete-coverage bathymetric maps (Figure C.1). Some systems also can record the strength of the reflected signal (“backscatter”), which can give information about the hardness or texture of the substrate. Systems are available for a range of resolutions and water depths. The consistent high-incidence beam creates quantitative depth data that are conducive to data processing and bottom classification. The high-incidence beam, however, makes multibeam systems less useful than are sidescan systems for discerning small objects, such as boulders that are less than 1 m across.
Automatic bottom classification systems (e.g., RoxAnn and QTC-View) are single-beam echosounders that analyze the character of the return echo from a footprint directly under the ship. Before being heard, they must be calibrated in a well-known area that has bottom types similar to those in the survey area. Data from separate surveys can be difficult to compare. Because they do not insonify a swath of seafloor, creating a map from the data requires considerable interpolation, and significant features can be missed. They are relatively simple for a nonspecialist to use.
The character of the substrate and the questions being addressed will dictate the choice of mapping tool. In an area where the seafloor is relatively smooth and where distinguishing gravel bed from fine-grained sediments is important, a relatively low-resolution
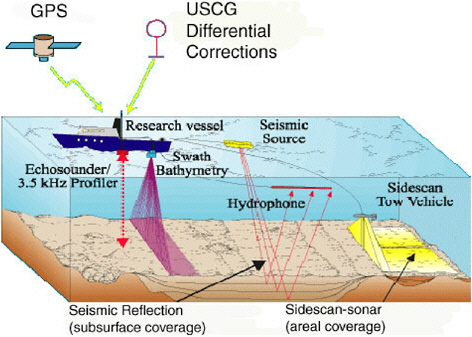
FIGURE C.1 Typical configurations of various types of seafloor mapping instruments discussed in this report (U.S. Geological Survey, 2001).
multibeam bathymetry system with backscatter data recorded might be ideal. In an area where individual boulders are important habitats, a sidescan system would probably be a better choice. If the seafloor is of uniform composition, but subtle changes in depth are important, a high-resolution multibeam system is appropriate. An automatic bottom classification system might be used as a preliminary reconnaissance tool to expand from a well-known area into an unknown area. The use of supporting data—from substrate samples or photographic or video observations—is necessary to interpret data from any of these mapping tools in terms of habitat.


